Zhaojing Yang
[CV]
[Google Scholar]
[GitHub]
[X]
[LinkedIn]
Hi! I'm a Founding Research Engineer at
Assured Robot Intelligence (ARI)
. My research focuses on Robot Learning to bring humanoid robots to real-world applications.
I've been fortunate to work with
Prof. Xiaolong Wang
at UCSD, and with
Prof. Erdem Bıyık
and
Prof. Gaurav Sukhatme
at USC. I received my MSCS degree from USC and my BEng degree in Computer Science from Shanghai Jiao Tong University.
News
[Jan, 2026] Our paper on
Learning from Constrained Demonstrators
was accepted to ICLR 2026. Congrats to Xinhu and the team!
[Oct, 2025] Our paper on
Active Reward Learning from Language Feedback
was accepted to IJRR. Congrats to Eisuke and the team!
[May, 2025] I joined ARI as a founding research engineer.
[Apr, 2025]
NaVILA
was accepted to RSS 2025. See you in Los Angeles!
[Oct, 2024] Our paper on
Learning from Comparative Language Feedback
was accepted to CoRL 2024!
[Jan, 2024] Our paper on
Quadrotors Collision Avoidance and Local Navigation
was accepted to ICRA 2024!
Publications
[Selected]
[All]
* denotes equal contribution, † denotes equal advising
NaVILA: Legged Robot Vision-Language-Action Model for Navigation
An-Chieh Cheng
*
,
Yandong Ji
*
,
Zhaojing Yang
*
,
Zaitian Gongye
,
Xueyan Zou
,
Jan Kautz
,
Erdem Bıyık
,
Hongxu Yin
†
,
Sifei Liu
†
,
Xiaolong Wang
†
RSS 2025
[Paper]
[VLA Code]
[Locomotion Code]
[Website]
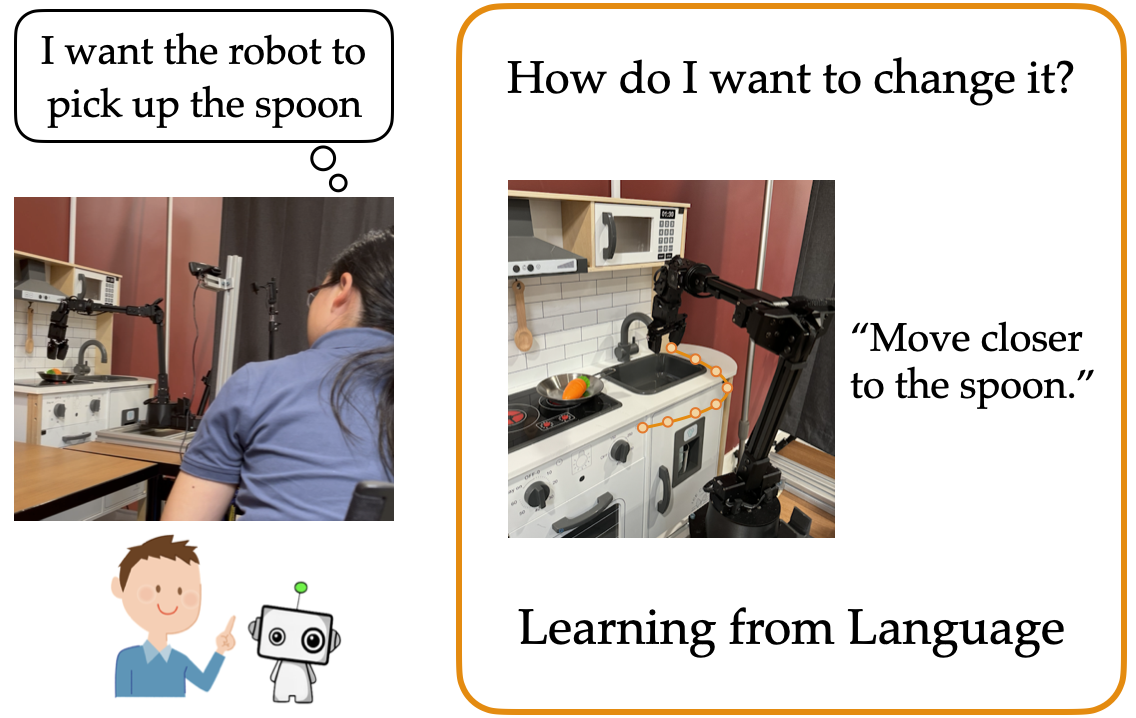
Trajectory Improvement and Reward Learning from Comparative Language Feedback
Zhaojing Yang
,
Miru Jun
,
Jeremy Tien
,
Stuart Russell
,
Anca Dragan
,
Erdem Bıyık
HRI 2024 Human-Interactive Robot Learning Workshop
CoRL 2024
[Paper]
[Code]
[Website]
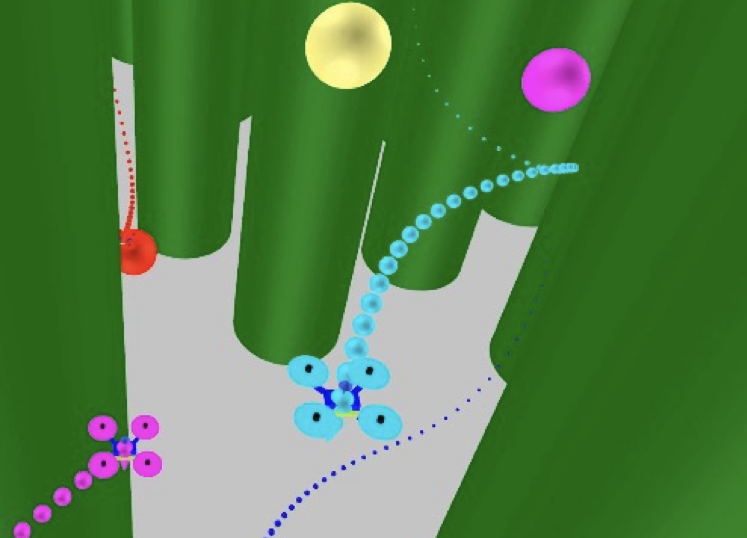
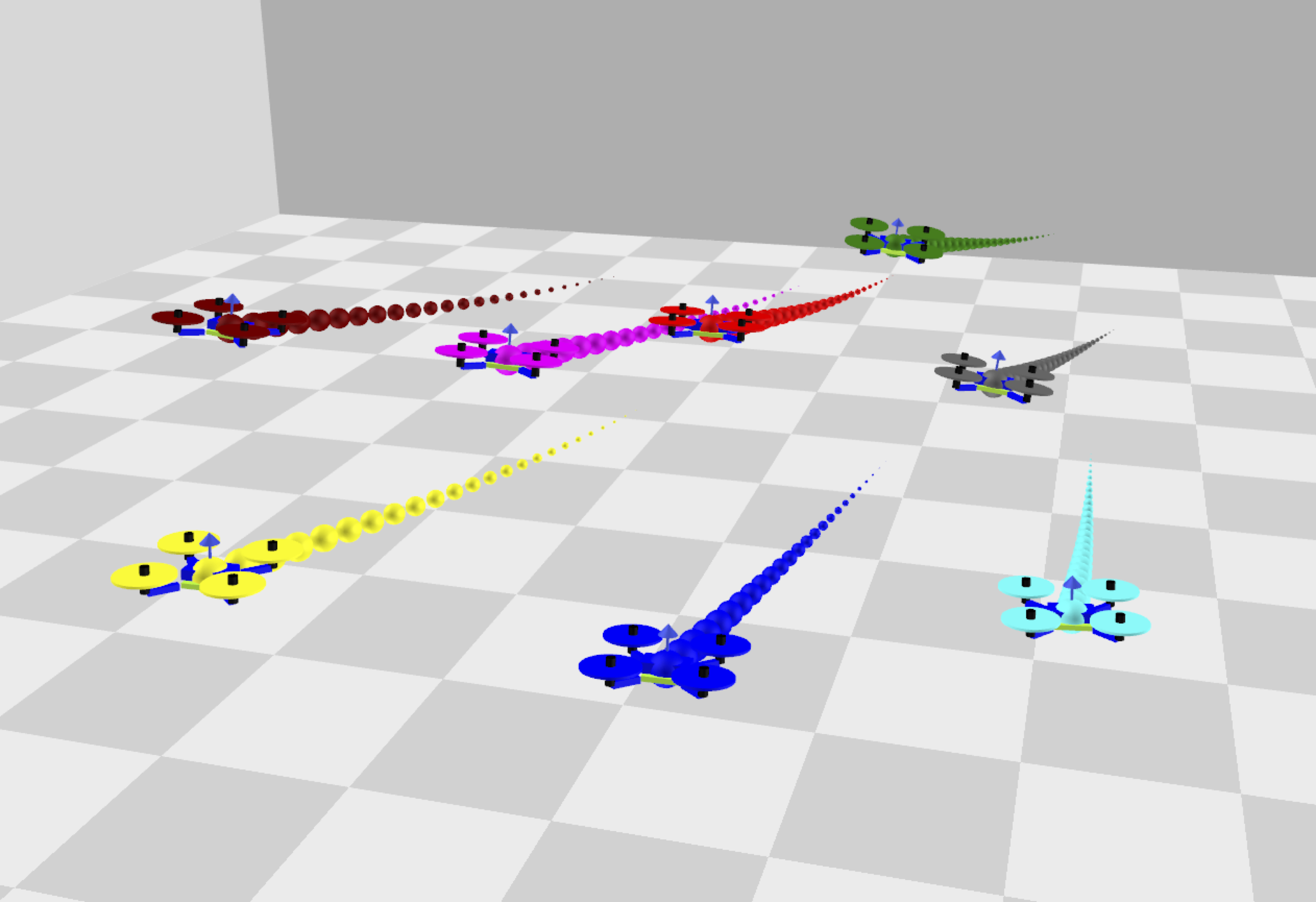
Collision Avoidance and Navigation for a Quadrotor Swarm Using End-to-end Deep Reinforcement Learning
Zhehui Huang
*
,
Zhaojing Yang
*
,
Rahul Krupani
,
Baskın Şenbaşlar
,
Sumeet Batra
,
Gaurav S. Sukhatme
ICRA 2024
[Paper]
[Code]
[Website]
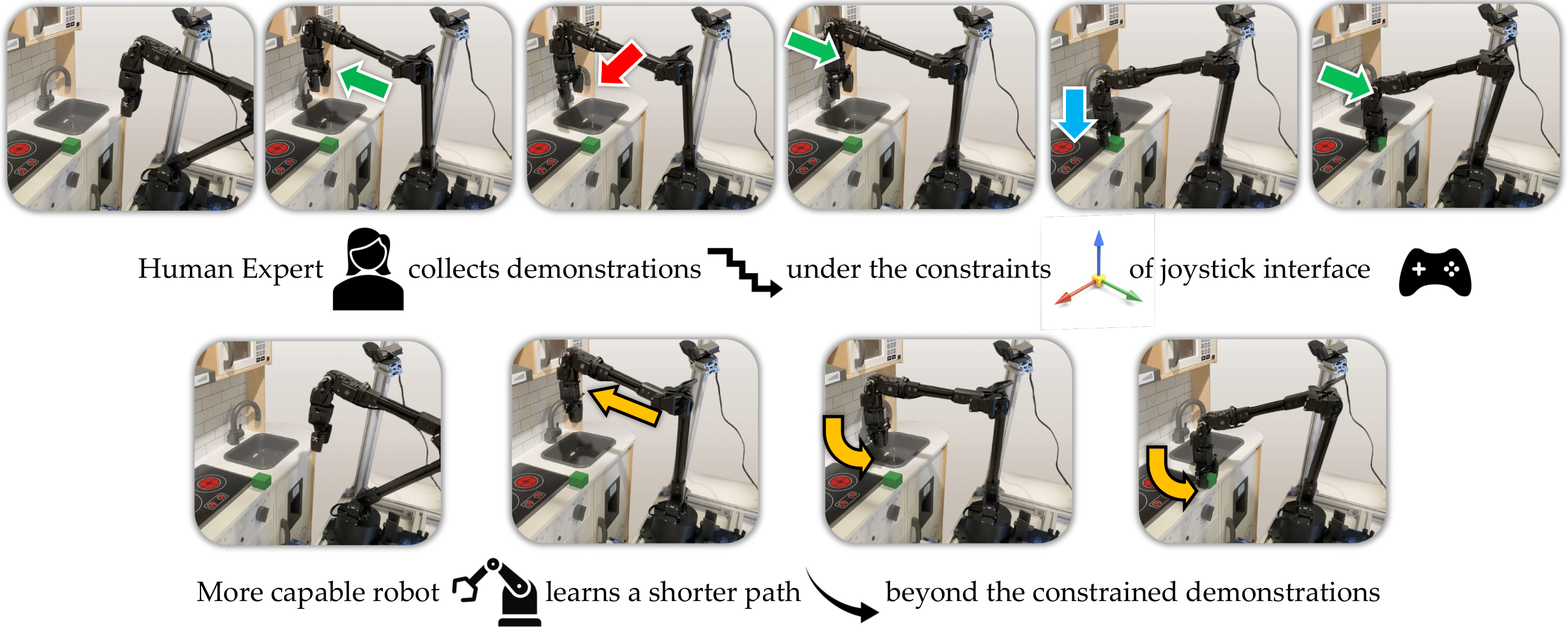
When a Robot is More Capable than a Human: Learning from Constrained Demonstrators
Xinhu Li
,
Ayush Jain
,
Zhaojing Yang
,
Yigit Korkmaz
,
Erdem Bıyık
ICLR 2026
[Paper]
[arXiv]
[Website]
Active Reward Learning and Iterative Trajectory Improvement from Comparative Language Feedback
Eisuke Hirota
*
,
Zhaojing Yang
*
,
Ayano Hiranaka
,
Miru Jun
,
Jeremy Tien
,
Stuart Russell
,
Anca Dragan
,
Erdem Bıyık
IJRR
[Paper]
[Code]
[Website]
NaVILA: Legged Robot Vision-Language-Action Model for Navigation
An-Chieh Cheng
*
,
Yandong Ji
*
,
Zhaojing Yang
*
,
Zaitian Gongye
,
Xueyan Zou
,
Jan Kautz
,
Erdem Bıyık
,
Hongxu Yin
†
,
Sifei Liu
†
,
Xiaolong Wang
†
RSS 2025
[Paper]
[VLA Code]
[Locomotion Code]
[Website]
Trajectory Improvement and Reward Learning from Comparative Language Feedback
Zhaojing Yang
,
Miru Jun
,
Jeremy Tien
,
Stuart Russell
,
Anca Dragan
,
Erdem Bıyık
HRI 2024 Human-Interactive Robot Learning Workshop
CoRL 2024
[Paper]
[Code]
[Website]
Collision Avoidance and Navigation for a Quadrotor Swarm Using End-to-end Deep Reinforcement Learning
Zhehui Huang
*
,
Zhaojing Yang
*
,
Rahul Krupani
,
Baskın Şenbaşlar
,
Sumeet Batra
,
Gaurav S. Sukhatme
ICRA 2024
[Paper]
[Code]
[Website]
QuadSwarm: A Modular Multi-Quadrotor Simulator for Deep Reinforcement Learning with Direct Thrust Control
Zhehui Huang
,
Sumeet Batra
,
Tao Chen
,
Rahul Krupani
,
Tushar Kumar
,
Artem Molchanov
,
Aleksei Petrenko
,
James Alan Preiss
,
Baskın Şenbaşlar
,
Zhaojing Yang
,
Gaurav S. Sukhatme
ICRA 2023 The Role of Robotics Simulators for Unmanned Aerial Vehicles Workshop
[Paper]
[Code]